
For one week, we had a interrogation : who or which is more able to estimate pressure caused by weight between a machine and a human hand? Nowadays, there is a basic idea that machines are more precise than humans. However humans are also able to feel something on their skin, and it’s always useful to know if something is touching you!
Humans have the ability to know where they put their hands. They can situated their body in space and feel when someone or something is touching them. This phenomena is called interoception. How does interoception work ? One part of the answer is that some sensors, called Merkel cells, are situated under our skin. The cells react when they feel something on the skin, even a low one, and communicate this information to our brain. Then, the brain makes an estimation of the weight. What about the machine sensitive to pressure variation ? These kind of machines are called FSR for force sensitive resistance. They convert the resistance changes into a weight. Afterwards, a computer can show an estimation on the screen. It is this mechanism that we used in our daily life when we cook using a scale.
That way, we brought face to face humans and machine, in order to test their rapidity (how long is the process to estimate a weight?) and accuracy (did they evaluate well the weight?) to pressure variation. Which sensor is the best? Make your bet! (and read this blogpost)
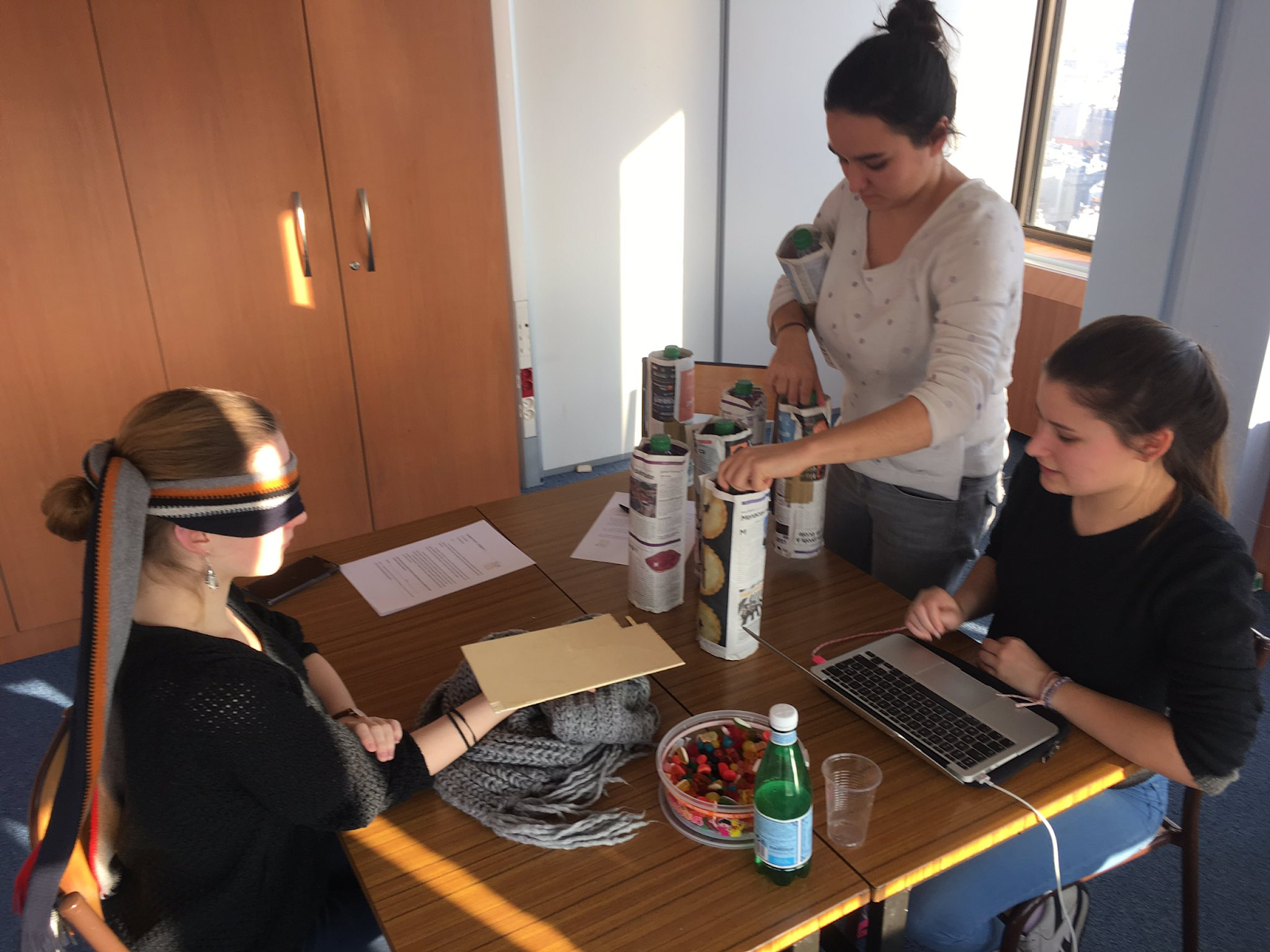
How did we made a comparison between these two sensors ? First, we asked people to come one by one. Then, we put a board on their hand to balance our masses. We blindfold them. We prepared 5 bottles filled with 300g, 500g, 800g, 1000g and 1300g of water. We covered the bottles with paper journal to cover water noises. Then the process was the following : we put a 1 kg mass on their hand and told them it was 1 kg. Then we replaced this bottle with a new mass to estimate and waited for them to answer. We put the weight in a random generated order, and each mass was put 5 times. The one 1kg acts as a tare as was put in between each estimation to give the person an idea of what it represent. You also do this when you cook and don’t want your scale take in account the container.
For the FSR sensor, we did exactly the same thing except that we build a set-up to put the bottle on
the sensor because the sensor is very small!
We prepared 5 bottles filled with 300g, 500g, 800g, 1000g and 1300g of water. We covered the
If you want to build your own arduino scale as we did, you can look at this video!
Do you remember which side you chose between human and machine? It is time to know if you guessed correctly!
In average, the sensor takes one second to make an estimation, against 5 seconds for a human. Machine 1, human 0.
Now for the second characteristic: which sensor has the best accuracy? We say something is accurate when it is to be able to estimate a weight correctly. In other words, if we put 300 grams and the answer is “300 grams”, then we can say that it is accurate.
Our results show that humans are better than FSR on this point. Indeed, we calculated the average of the response for all the participants and for each weight. We observed that, in average, humans are more accurate than FSR. For instance, for 300g, we obtain an average of 300g for humans while the FSR estimated the weight at 800g... The results from the FSR may show a saturation. Indeed, we observed that the value given by this sensor is always around 900g, and was never higher than 1000g. This means that the sensor can’t properly estimate heavy objects. Machine 1, humans 1.
In conclusion, our two sensors were complementary. The FSR is quicker than humans while the opposite was observed for the accuracy. It is interesting to notice that we had the time to repeat the experiment only 12 times for the humans and 4 times for the FSR sensor. This means that our results aren’t precise enough to make any definitive statement. Indeed, if we don’t repeat an experiment enough, there are a lot of bias such as mood (for humans) or shape and position of the sensors. If you are interested in weight estimation you can check the study of the previous year here[1].
If you would like to have more precision on our protocol and do it at home, you can check our github repository![2]
To go further :
[1] wisdom of the crowd http://learningthruresearch.blogspot.com/2016/01/wisdom-of-crowds-vs-electronic-sensor.html
How skin fill pressure : “Responses in Glabrous Skin Mechanoreceptors during Precision Grip in Humans. - PubMed - NCBI.” Accessed January 24, 2017. https://www.ncbi.nlm.nih.gov/pubmed/3582527.
You can find more ressources on our Github or see our Storify composed of the best moments of the week !

No comments:
Post a Comment